Acwing算法基础课:动态规划
动态规划
内容部分来自:什么是动态规划(Dynamic Programming)?动态规划的意义是什么? - 阮行止的回答 - 知乎
Widely-known Definition
无后效性:如果给定某一阶段的状态,则在这一阶段以后过程的发展不受这阶段以前各段状态的影响。
最优子结构:大问题的最优解可以由小问题的最优解推出。
使用动态规划的条件:能将大问题拆成几个小问题,且满足无后效性、最优子结构性质。
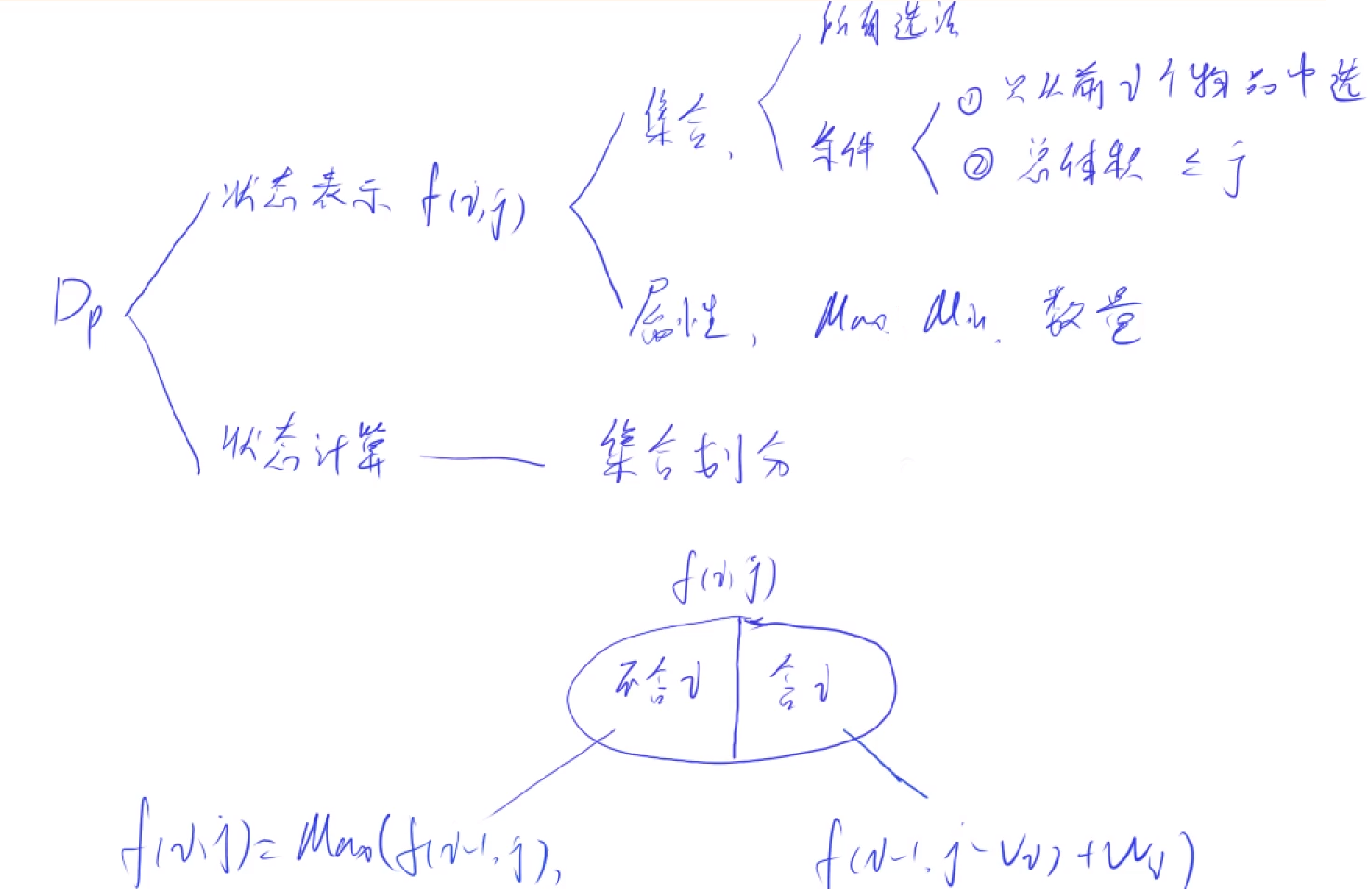
“闫氏”集合分析法
(以01背包问题为例)
DP为什么会快?
无论是DP还是暴力,我们的算法都是在可能解空间内,寻找最优解。
来看钞票问题。暴力做法是枚举所有的可能解,这是最大的可能解空间。 DP是枚举有希望成为答案的解。这个空间比暴力的小得多。
也就是说:DP自带剪枝。
DP舍弃了一大堆不可能成为最优解的答案。譬如:
- 15 = 5+5+5 被考虑了。
- 15 = 5+5+1+1+1+1+1 从来没有考虑过,因为这不可能成为最优解。
从而我们可以得到DP的核心思想:尽量缩小可能解空间。
在暴力算法中,可能解空间往往是指数级的大小;如果我们采用DP,那么有可能把解空间的大小降到多项式级。
一般来说,解空间越小,寻找解就越快。这样就完成了优化。
如何设计DP算法
下面介绍比较通用的设计DP算法的步骤。
首先,把我们面对的局面表示为x。这一步称为设计状态。对于状态x,记我们要求出的答案(e.g. 最小费用)为f(x).我们的目标是求出f(T)。找出f(x)与哪些局面有关(记为p),写出一个式子(称为状态转移方程),通过f(p)来推出f(x)。
设计DP算法,往往可以遵循DP三连:
- 我是谁? ——设计状态,表示局面
- 我从哪里来?
- 我要到哪里去? ——设计转移
设计状态是DP的基础。接下来的设计转移,有两种方式:一种是考虑我从哪里来(本文之前提到的两个例子,都是在考虑“我从哪里来”);另一种是考虑我到哪里去,这常见于求出f(x)之后,更新能从x走到的一些解。这种DP也是不少的,我们以后会遇到。
总而言之,“我从哪里来”和“我要到哪里去”只需要考虑清楚其中一个,就能设计出状态转移方程,从而写代码求解问题。前者又称pull型的转移,后者又称push型的转移。
DP算法的两种实现方式
DP能实现的前提:状态间的依赖关系是DAG,即不能有环
- 按顺序递推:对于容易找到依赖关系规律,计算顺序明确的(线性DP/区间DP)
- 记忆化搜索:不容易找到依赖关系规律,计算顺序不明确的(区间DP/“滑雪”)
DP算法的时间复杂度计算
一般是状态数×状态转移计算量
背包问题
01背包问题
\[f[i][j] = \max\{f[i-1][j], f[i-1][j-v_i] + w_i\};\]可注意到两个特点:
- 第一分量只依赖于上一层($i-1$)
- 第二份量都$\le j$
由此代码中第二层循环逆序遍历的情况下,状态表可减为一维。
1
2
3
for (int i=1; i<=n; i++)
for (int j=m; j>=v[i]; j--)
f[j] = max(f[j], f[j-v[i]] + w[i]);
完全背包问题
\[\begin{equation} f[i][j] = \max\{f[i-1][j], f[i-1][j-v_i]+w_i, f[i-1][j-2v_i]+2w_i, ..., f[i-1][j-kv_i]+kw_i\} \end{equation}\]其中$j>=kv_i$。若直接按此公式递推,时间复杂度$O(N^2V)$。
由于
\[\begin{equation} f[i][j-v_i] = \max\{f[i-1][j-v_i], f[i-1][j-2v_i]+w_i, f[i-1][j-3v_i]+2w_i, ..., f[i-1][j-kv_i]+(k-1)w_i\} \end{equation}\]“错位相减”可得
\[\begin{equation} f[i][j] = \max\{f[i-1][j], f[i][j-v_i]+w_i\} \end{equation}\]同样地,观察第一、第二分量的特点,可在第二层循环顺序遍历的情况下,将代码中状态表优化为一维的。优化本质上是利用了先前已计算的状态,避免重复计算。这样,时间复杂度降到了$O(NV)$。
1
2
3
for (int i=1; i<=n; i++)
for (int j=v[i]; j<=m; j++)
f[j] = max(f[j], f[j-v[i]] + w[i]);
可发现,优化后的01背包和完全背包代码中,区别仅在于第二层循环的遍历顺序。
多重背包问题
\[f[i][j] = \max\{f[i-1][j], f[i-1][j-v_i]+w_i, f[i-1][j-2v_i]+2w_i, ..., f[i-1][j-kv_i]+kw_i\}\]其中,满足$k\le min{\frac{j}{v_i}, s_i}$,$s_i$是第$i$个物品的数量。仍可以暴力求解,复杂度$O(N^2V)$。
由于上面k与完全背包不同的条件,得不出公式(2),无法与(1)“错位相减”,不能用完全背包的优化方法。
二进制优化
对于每一种物品,提供$\log s_i$种“打包”,每个包中该物品的数量分别为:
\[1, 2, 4, ..., 2^k \\ 或\\ 1, 2, 4, ..., 2^k, c\]其中$c\gt 0$, $k$是最大的取值使得$1+2+4+…+2^k(+c)=s_i$。由此,$1, 2, 4, …, 2^k$的组合可表示0~$2^{k+1}-1$的数,加上c可表示c~$s_i$的数,由于$c<2^{k+1}$(否则k可取更大值),这些数的组合能够“可重、不漏、不多”地表示0~$s_i$的每一个数。
于是多重背包问题可转换为一个01背包问题,时间复杂度$O(NV\log s)$。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
int cnt = 0; // 将输入在线“打包”转为01背包问题
for (int i=1; i<=n; i++) {
int a, b, s;
scanf("%d%d%d", &a, &b, &s);
int k=1;
while (k <= s) {
v[++cnt] = k*a;
w[cnt] = k*b;
s -= k;
k <<= 1;
}
if (s > 0) {
v[++cnt] = s*a;
w[cnt] = s*b;
}
}
n = cnt;
for (int i=1; i<=n; i++) // 一趟01背包模板
for (int j=m; j>=v[i]; j--)
f[j] = max(f[j], f[j-v[i]]+w[i]);
printf("%d\n", f[m]);
优先队列优化
TBD
分组背包问题
trivial
1
2
3
4
5
for (int i=1; i<=n; i++)
for (int j=m; j>=0; j--)
for (int k=1; k<=s[i]; k++)
if (j>=v[i][k])
f[j] = max(f[j], f[j-v[i][k]]+w[i][k]);
时间复杂度$O(NVS)$。
线性DP
数字三角形
都是求路径最大和,自顶向下和自底向上是一样的(“无向图”):
- 自顶向下:需判断边界/初始化边界为负无穷,最后需要求最值
- 自底向上:不需判断边界,不需求最值
另外,使用边界(用-INF填充)可避免if判断
最长上升子序列
$f[i]$ 定义为所有以$a_i$结尾的上升子序列中的最长长度
\[f[i] = \max\{0,f[j]\}+1 \\ 其中j=1,2,...,i-1且a_j<a_i\]时间复杂度$O(n^2)$
$O(n \log n)$ 做法*
定义$q[i]$为当前所有长度为$i$的上升子序列结尾数的最小值,可以证明$q[i]$单调递增(不严格)(可反证)
于是可二分查找$q[j] < a_i$的边界$j$,$f[i] = j+1$
同时更新$q[]$:因为$q[j+1]\ge a_i$,所以直接令$q[j+1]=a_i$即可。
最长公共子序列
定义$f[i][j]$为串$a[1…i]$和$b[1…j]$的最长公共子序列长度
\[f[i][j] = \begin{cases} \max\{f[i-1][j-1]+1, f[i-1][j], f[i][j-1]\} & a_i=b_j\\ \max\{f[i-1][j], f[i][j-1]\} & a_i\neq b_j \end{cases}\]最短编辑距离*
定义$f[i][j]$为将串$a[1…i]$变为$b[1…j]$的最小操作次数
状态转移时,只考虑对$a[i]$的操作即可,原因证明较复杂,参考acwing讨论区
不严谨理解:对每个操作序列,如果存在对最后一个字符的操作,则都可以等价地将该操作移到最后执行
\[f[i][j] = \min \{f[i-1][j]+1, f[i][j-1]+1, \begin{cases} f[i-1][j-1]+1 & a_i \neq b_j \\ f[i-1][j-1] & a_i = b_j \end{cases} \}\]初始化:$f[0][j]=j, f[i][0]=i, 1\le i \le n, 1\le j \le m$
区间DP
石子合并
定义$f[i][j]$为合并区间$[i, j]$的石子为一堆的最小代价
\[f[i][j]=\min\{f[i][k]+f[k+1][j] \mid k=i,i+1,...,j-1\}+\sum_{m=i}^{j}w_m\]初始值$f[i][i]=0$
按区间长度依次迭代递推:$2,3,4,…,n$
时间复杂度:$O(n^2 \cdot n) = O(n^3)$
计数类DP
整数划分
方法1
定义$f[i][j]$为整数$i$的所有最大值为$j$的划分的数量
\[f[i][j] = \begin{cases} \sum_{k=1}^{\min\{j, i-j\}} f[i-j][k] & j\lt i \\ 1 & j=i \end{cases}\]求和部分可用前缀和优化,时间复杂度$O(n^2)$
方法2
定义$f[i][j]$为所有总和为$i$,表示成$j$个数的和的方案数
\[f[i][j] = f[i-1][j-1]+f[i-j][j]\]可分为两部分:最小值为1的方案($f[i-1][j-1]$),和最小值大于1的方案($f[i-j][j]$,每个数减一)。
方法3
遵循完全背包问题的思路,有类似的定义:定义$f[i][j]$为考虑数$1$~$i$,总和为$j$的方案数
朴素版本时间复杂度$O(n^2 \log n)$,经与完全背包类似的公式化简(“错位相减”)可达到$O(n^2)$。
\[f[i][j] = f[i-1][j] + f[i][j-i]\]数位统计、状态压缩DP
跳了
树形DP
没有上司的舞会
定义$f[i][j]$为以节点$i$为根节点的子树,选择节点$i$($j=1$)/不选择节点$i$($j = 0$)时子树中选择节点权值和的最大值
对节点$x$,其子节点$v_i$(若有):
\[f[x][0] = \sum_i \max \{f[v_i][0], f[v_i][1]\} \\ f[x][1] = \sum_i f[v_i][0] + w_x\]状态转移依赖于子节点,所以可在DFS过程中后序遍历树,填充DP表;使用邻接表存树,只存出边即可
DP表初始化:全填0即可
记忆化搜索
滑雪
定义$f[i][j]$为从$(i, j)$出发的最大轨迹长度
\[f[i][j] = \max \{ f[i-1][j], f[i][j+1], f[i+1][j], f[i][j-1] \} + 1\]使用一般的递推难以计算DP表(可能需要先算“无路可走”的格子,再算“有一路可走”的格子……),适用记忆化搜索
记忆化搜索是DP的一种实现方式,但仍需要满足前提:状态依赖关系中不存在环
此问题的性质保证了不存在环:因为轨迹上要求高度严格递减