Acwing算法基础课:搜索与图论
DFS
搜索树:由状态构成的树状结构
DFS:深度优先遍历搜索树。使用栈存储历经的路径,故使用空间$O(h)$;而BFS可能使用$O(2^h)$的空间,故一般使用DFS占空间较小。
对于状态信息的存储,可在函数局部(栈中)存储,也可在全局存储(全局变量):
- 可使用全局变量存储回溯时易于恢复现场的信息,同时在状态转移时免于频繁复制(适合数组类)
- 可使用局部变量存储回溯时不方便恢复现场的信息,以及较小的信息(循环变量等)
编码方式的选择上,可选择调用者保存/被调用者保存,即在函数调用前、后保存、恢复现场,或是在函数开头、结尾处保存、恢复现场。
如何写dfs()函数
- 定义好
dfs()函数、参数的意义,即明确这个(递归)函数要干什么?:要填第x个空,要填第x行…… - 考虑清楚边界情况
- 维护好状态(状态的设置、恢复)
- 可上手写代码后再考虑
题目:排列数字
dfs(x)的意义:准备填下标为x的数
题目:n-皇后问题
两种搜索方式:
dfs(x):准备填第x行的皇后dfs(x, y, s):准备填下标为(x, y)的皇后,目前已经填了s个皇后
实际效率前者比后者更优,因为前者经过分析,搜索方式更充分地利用了性质(每行只有1个皇后);从状态数来说,前者为$O(n!)$量级,而后者为$O(2^{n^2})$量级。
另外,主对角线和副对角线坐标到截距的映射函数:
对于坐标(x, y)的点,主对角线编号:dg[x-y+n],副对角线编号: udg[x+y]
BFS
使用”队列“数据结构。对于简单的、可预估大小的队列,可以手写队列,优点是常数小、有对数据更底层的控制;对不可预估数量的队列可使用STL。
题目:八数码
难点:
- 状态的设计:一个二维数组?用一个
string? - 状态中距离的表示:距离
d放在状态结构体中?专门开一个unordered_map?
经验:考虑更多地利用标准库(string、unordered_map),可少写很多代码、代码更简洁;缺点是常数较大。涉及哈希?用string表示状态的话,自己就不用写哈希函数了(标准库支持std::hash<string>)。
树与图的存储
- 邻接表:一般的选择
- 邻接矩阵:占用空间大,仅适用于稠密图,对于随机访问边权有性能优势($O(1)$);*不能存重边
邻接表:
1
2
3
4
5
6
7
const int N = 100005, M = 2* N; // 树:有向边数 = 2*(n-1)
int h[N], e[M], ne[M], idx;
void add(int a, int b) { // 建边: a -> b
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
拓扑排序
- 可以用来判断图中是否有环(包括自环)
- 可以生成一个DAG的拓扑序
步骤:
- 所有入度为0的点入队
- 进行BFS(仅当入度减为0时入队)
- BFS中队列入队顺序就是拓扑序
最短路
图论题:
- 抽象为图论问题,建图 *难点
- 利用算法模板求解
最短路算法的选择
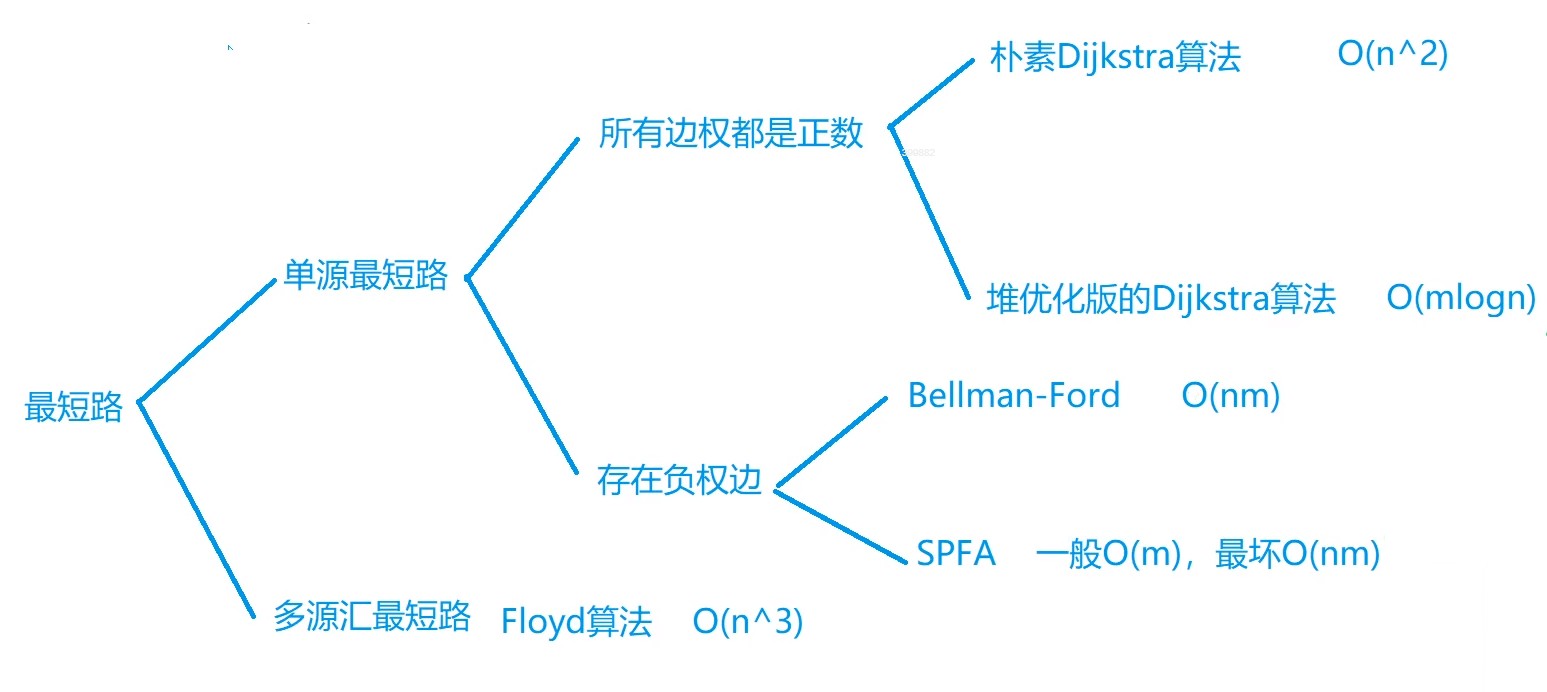
经测试,在稠密图数据下,堆优化/朴素Dijkstra时间差别不大;当然还是选最合适的用更好。
Floyd虽然复杂度较高,但常数很小(仅一条语句)。
朴素Dijkstra
时间复杂度$O(n^2)$,适合稠密图。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
const int N = 510, INF = 0x3f3f3f3f;
int g[N][N]; // 邻接矩阵存图
int d[N];
bool st[N]; // 点是否在集合s中
int n, m;
int dijkstra() {
memset(d, 0x3f, sizeof d);
d[1] = 0;
for (int i=1; i<=n; i++) {
int t = -1;
for (int j=1; j<=n; j++) { // 找当前最小距离的节点
if (!st[j] && (t == -1 || d[j] < d[t]))
t = j;
}
st[t] = true;
for (int j=1; j<=n; j++) // 松弛
d[j] = min(d[j], d[t] + g[t][j]);
}
if (d[n] == INF) return -1;
return d[n];
}
堆优化的Dijkstra
时间复杂度$O(m \log n)$,适合稀疏图。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
const int N = 150010;
typedef pair<int, int> PII;
int h[N], e[N], w[N], ne[N], idx; // 使用邻接表存图
int d[N];
bool st[N];
priority_queue<PII, vector<PII>, greater<PII>> q; // 存pair,第一分量存距离,第二分量存节点编号
int n, m;
int dijkstra() {
memset(d, 0x3f, sizeof d);
d[1] = 0;
q.push({0, 1});
while (q.size()) {
auto t = q.top(); // 取距离最近的点(可能有先前的冗余记录)
q.pop();
int ver = t.second, dis = t.first;
if (st[ver]) continue; // 跳过先前的冗余记录
st[ver] = true;
for (int i=h[ver]; i!=-1; i=ne[i]) { // 松弛
int u = e[i];
if (dis+w[i] < d[u]) {
d[u] = dis + w[i];
q.push({d[u], u});
}
}
}
if (d[n] == 0x3f3f3f3f) return -1;
return d[n];
}
Dijkstra算法假设图中没有负权边,只能处理非负权的情况。
Bellman-Ford
$n-1$次迭代,每次对所有边进行松弛操作。
可以实现求“最多经过k条边的最短路”。(SPFA也可以实现,只要维护好路径长度即可)
题目:有边数限制的最短路
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
const int N = 510, M = 10010;
struct {
int a, b, w;
} edges[M]; // 由于算法只单纯枚举边,不需拓扑信息,可使用结构体数组存图
int n, m, k;
int d[N], backup[N]; // backup[] 保存上次迭代结果,防止在一次迭代内部发生“串联”
int bellman_ford() {
memset(d, 0x3f, sizeof d);
d[1] = 0;
for (int i=1; i<=k; i++) { // k 次迭代
memcpy(backup, d, sizeof d); // 保存上次迭代结果
for (int j=0; j<m; j++) {
int a=edges[j].a, b=edges[j].b, w=edges[j].w;
d[b] = min(d[b], backup[a]+w);
}
}
return d[n];
}
SPFA
优化的Bellman-Ford算法,基于每次迭代实际上不会松弛所有边,只可能会松弛上次更新节点的邻接边。
时间复杂度一般$O(m)$,若被卡最坏$O(nm)$(网格状图)。如果不被卡,有时甚至比Dijkstra还快。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
const int N = 100010;
int h[N], w[N], e[N], ne[N], idx; // 不同于BF算法,需使用邻接表存图
int dist[N];
int n, m;
queue<int> q;
bool st[N]; // 节点是否已在队列中,若已在则不需重复加入
int spfa() {
memset(dist, 0x3f, sizeof dist);
dist[1] = 0;
q.push(1);
st[1] = true;
while (q.size()) {
int t = q.front();
q.pop();
st[t] = false;
for (int i=h[t]; i!=-1; i=ne[i]) {
int u = e[i];
if (dist[u] > dist[t] + w[i]) { // 仅当更新的点,才放入松弛队列
dist[u] = dist[t] + w[i];
if (!st[u]) {
q.push(u);
st[u] = true;
}
}
}
}
return dist[n];
}
与Dijkstra的对比
SPFA与Dijkstra有些类似,都是类似于BFS的操作。但不同之处在于:
- Dijkstra基于贪心策略,每次迭代选择一个距离最近的点进行标记,然后松弛它的所有邻接边;且一旦被标记,最小距离就不再改变
- SPFA逐层进行松弛,之前松驰过的点还可能再次被松弛
SPFA求负环
添加一虚拟源点,向其他所有点连一权重为0的边,则该图存在负环等价于原图存在负环。
同时设置一cnt[]数组,统计虚拟源点到该节点的跳数。若cnt[x]>=n,则说明最短路上至少有n+1个点,根据抽屉原理,这其中至少有两个点相同,故存在环;又因为此路径为最短路,所以该环为负环。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
const int N = 2010, M = 10010;
int h[N], e[M], w[M], ne[M], idx;
queue<int> q;
bool st[N];
int dist[N], cnt[N]; // dist[] 存储各个节点到虚拟源点的最短路距离,初始值全为0
int n, m;
bool spfa() {
for (int i=1; i<=n; i++) {
q.push(i);
st[i] = true;
}
while (q.size()) {
int t = q.front();
q.pop();
st[t] = false;
for (int i=h[t]; i!=-1; i=ne[i]) {
int u = e[i];
if (dist[u] > dist[t] + w[i]) { // 在一开始,只有负权边会使该条件成立,故减少了队列中节点数,提高判断负环速度
dist[u] = dist[t] + w[i];
cnt[u] = cnt[t] + 1; // 维护最短路径跳数
if (cnt[u] >= n) return true;
if (!st[u]) {
q.push(u);
st[u] = true;
}
}
}
}
return false;
}
Floyd
基于动态规划思想。
d[k, i, j] 表示只经过点1~k,i与j间的最短距离。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
const int N = 210, INF = 0x3f3f3f3f;
int d[N][N];
int n, m, Q;
void floyd() {
for (int k=1; k<=n; k++) // 第 k 轮迭代
for (int i=1; i<=n; i++)
for (int j=1; j<=n; j++)
d[i][j] = min(d[i][j], d[i][k] + d[k][j]);
}
int main() {
scanf("%d%d%d", &n, &m, &Q);
for (int i=1; i<=n; i++)
for (int j=1; j<=n; j++)
if (i == j) d[i][j] = 0;
else d[i][j] = INF;
for (int i=1; i<=m; i++) {
int x, y, z;
scanf("%d%d%d", &x, &y, &z);
d[x][y] = min(d[x][y], z);
}
floyd();
while (Q --) {
int x, y;
scanf("%d%d", &x, &y);
if (d[x][y] > INF / 2) puts("impossible"); // 对不可到达的点,可能有负边,导致距离稍微小于INF
else printf("%d\n", d[x][y]);
}
}
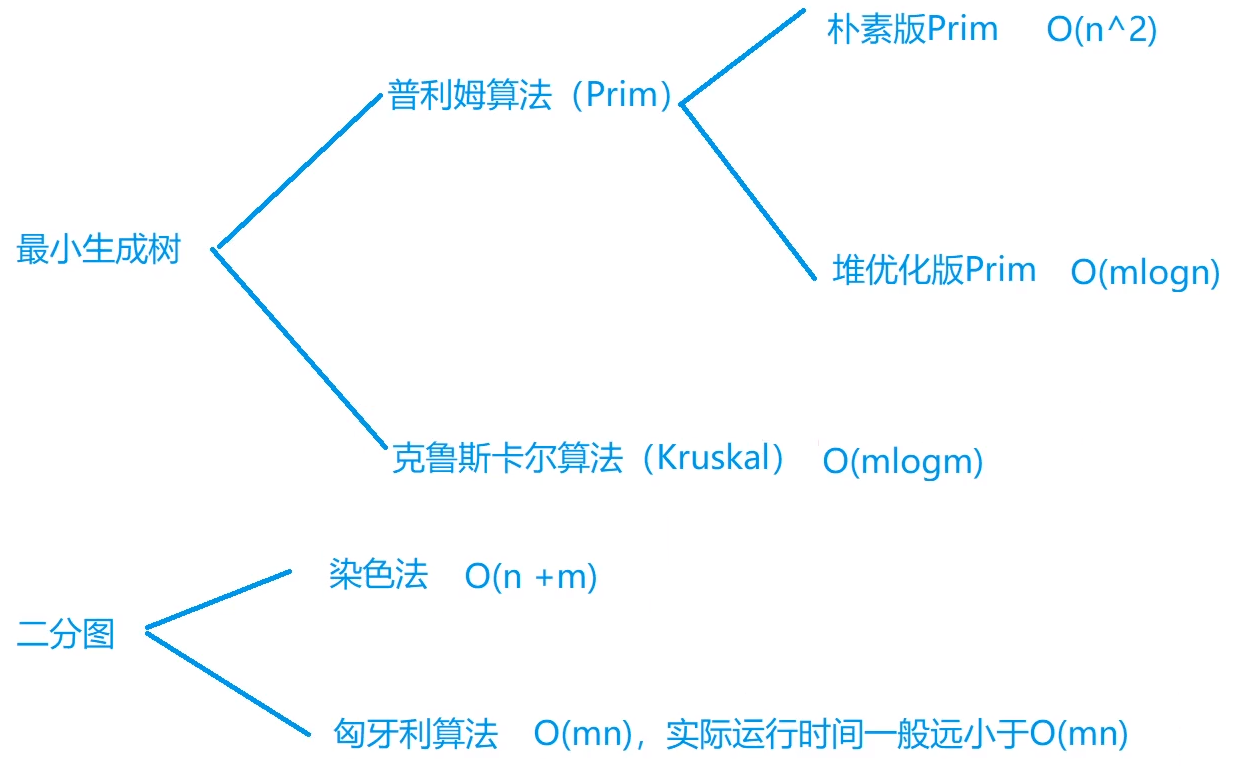
最小生成树
最小生成树问题只考虑无向图,故存图需存双向边。
朴素Prim算法
从一个节点开始,“逐渐生长”成一棵树。时间复杂度$O(n^2)$,适合稠密图。
dist[]数组的意义:点到“集合”的距离
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
const int N = 510, INF = 0x3f3f3f3f;
int g[N][N];
int dist[N];
bool st[N];
int n, m;
int prim() {
int ans = 0;
memset(dist, 0x3f, sizeof dist);
for (int i=0; i<n; i++) {
int t = -1;
for (int j=1; j<=n; j++)
if (!st[j] && (t == -1 || dist[j] < dist[t]))
t = j;
if (i && dist[t] == INF) return INF; // 不连通,无最小生成树
st[t] = true;
if (i) ans += dist[t]; // 在更新距离前更新答案,以正确处理自环
for (int j=1; j<=n; j++) // 维护点到集合的距离
dist[j] = min(dist[j], g[t][j]);
}
return ans;
}
int main() {
cin >> n >> m;
memset(g, 0x3f, sizeof g); // 全部初始化为INF
for (int i=0; i<m; i++) {
int a, b, c;
cin >> a >> b >> c;
g[a][b] = g[b][a] = min(g[a][b], c); // !! 无向图存双向边
}
int ans = prim();
if (ans == INF) puts("impossible");
else printf("%d", ans);
}
对于重边和自环的处理:
- 重边在邻接矩阵中存最小值即可
- 自环可以选择:不存(默认值INF);或在Prim算法中注意顺序,先累加答案,再更新邻接点距离
Kruskal算法
“逐渐合并”成一棵树。时间复杂度$O(m \log m)$,适合稀疏图。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
const int N = 100010, M = 200010;
int p[N];
struct Edge{ // 使用结构体数组存边
int a, b, w;
bool operator<(const Edge &e) {
return w < e.w;
}
} edges[M];
int n, m;
int find(int x) {
if (p[x]!=x) return p[x] = find(p[x]);
return x;
}
int main(){
cin >> n >> m;
for (int i=0; i<m; i++)
cin >> edges[i].a >> edges[i].b >> edges[i].w;
for (int i=1; i<=n; i++)
p[i] = i;
// Kruskal:
sort(edges, edges+m); // 从小到大排序边
int ans = 0, cnt = 0;
for (int i=0; i<m; i++) {
int a=edges[i].a, b=edges[i].b, w=edges[i].w;
a = find(a), b = find(b);
if (a != b) {
ans += w;
p[b] = a;
cnt ++;
}
}
if (cnt == n-1) printf("%d", ans);
else puts("impossible");
}
重边和自环的处理:并查集自动判断。
二分图
显然:一个图是二分图,当且仅当图可被2-染色。
定理:一个图是二分图,当且仅当图中不存在奇数环。
证明
必要性:反证。假设存在奇数环,可画图发现,一定有在同一半边的边。
充分性:想象对图进行DFS 2-染色,若不存在奇数环,则在DFS过程中一定不存在矛盾。可以反证:假设存在矛盾,则图中一定有奇数环。
染色法判断二分图
使用color[]数组标记节点:0-未染色,1-黑色,2-白色。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
const int N = 100010, M = 200010;
int h[N], e[M], ne[M], idx;
int n, m;
int color[N];
bool dfs(int x, int c) {
color[x] = c;
for (int i=h[x]; i!=-1; i=ne[i]) {
int u = e[i];
if (!color[u]) {
if (!dfs(u, 3-c)) return false;
} else if (color[u] == c)
return false;
}
return true;
}
void add(int a, int b) {
e[idx] = b, ne[idx] = h[a], h[a] = idx++;
}
int main(){
cin >> n >> m;
memset(h, -1, sizeof h);
for (int i=0; i<m; i++) {
int a, b;
cin >> a >> b;
add(a, b), add(b, a);
}
bool flag = true;
for (int i=1; i<=n; i++) {
if (!color[i]) {
if (!dfs(i, 1)) {
flag = false;
break;
}
}
}
if (flag) puts("Yes");
else puts("No");
}
题目:关押罪犯
二分+染色法判断二分图
- 思路一:先对边排序,对边的序号二分
- 思路二:直接对答案二分(yxc)
技巧:dfs时枚举临界点时可限制权重,以达到“删边”的效果。
正确性证明:考虑二分边界,反证法
心得:
- 有时候很可惜,思路对了就差一小步做不出来(无向图忘加双向边)
- 代码比较复杂的情况下,可能不好分辨、调试:是思路错了,还是代码有bug?
- 写代码要细心,优先级:正确性、可读性 » 效率
- 在对思路有自信的情况下(可以证明),若结果仍不对,可以沉下心来一行一行地检查、思量代码,或许能发现bug
匈牙利算法求二分图的最大匹配
可以用只有单向边(左到右)的邻接表表示二分图,左、右两边的节点编号均从1开始。
st[]数组表示一轮匹配中,右侧已经被考虑过的节点。递归过程中,上层考虑过的节点不再进行考虑,因为上层可能正考虑匹配该节点,同时防止死循环。
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
const int N = 510, M = 100010;
int h[N], e[M], ne[M], idx; // 仅存储左侧指向右侧的边
int match[N]; // 当前右侧节点匹配的左侧节点
bool st[N];
int n1, n2, m;
bool find(int x) {
for (int i=h[x]; i!=-1; i=ne[i]) {
int u = e[i];
if (!st[u]) {
st[u] = true;
if (!match[u] || find(match[u])) {
match[u] = x;
return true;
}
}
}
return false;
}
void add(int x, int y) {
e[idx] = y, ne[idx] = h[x], h[x] = idx++;
}
int main(){
cin >> n1 >> n2 >> m;
memset(h, -1, sizeof h);
for (int i=0; i<m; i++) {
int x, y;
cin >> x >> y;
add(x, y);
}
int ans = 0;
for (int i=1; i<=n1; i++) {
memset(st, false, sizeof st);
if (find(i)) ans++;
}
cout << ans << endl;
}
练习:棋盘覆盖